AutoQuad project – Introduction
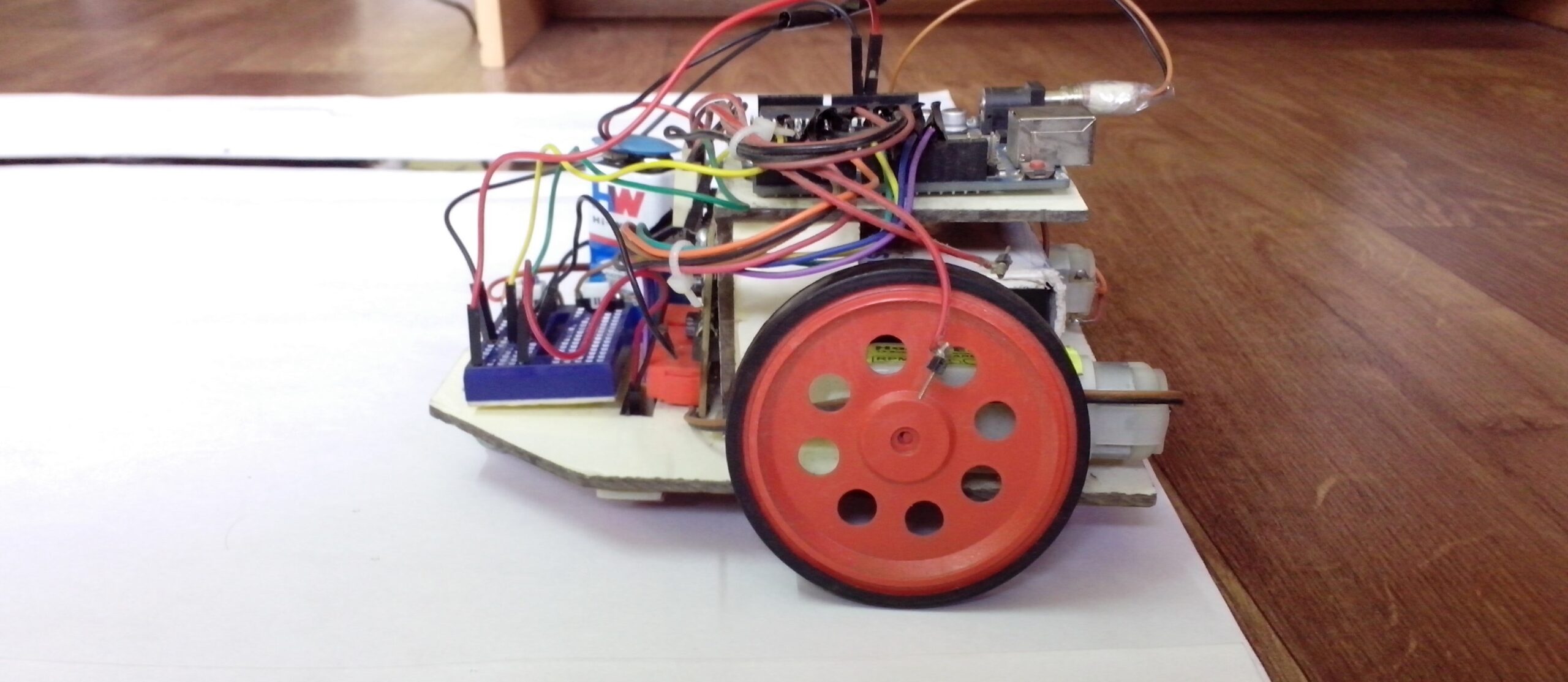
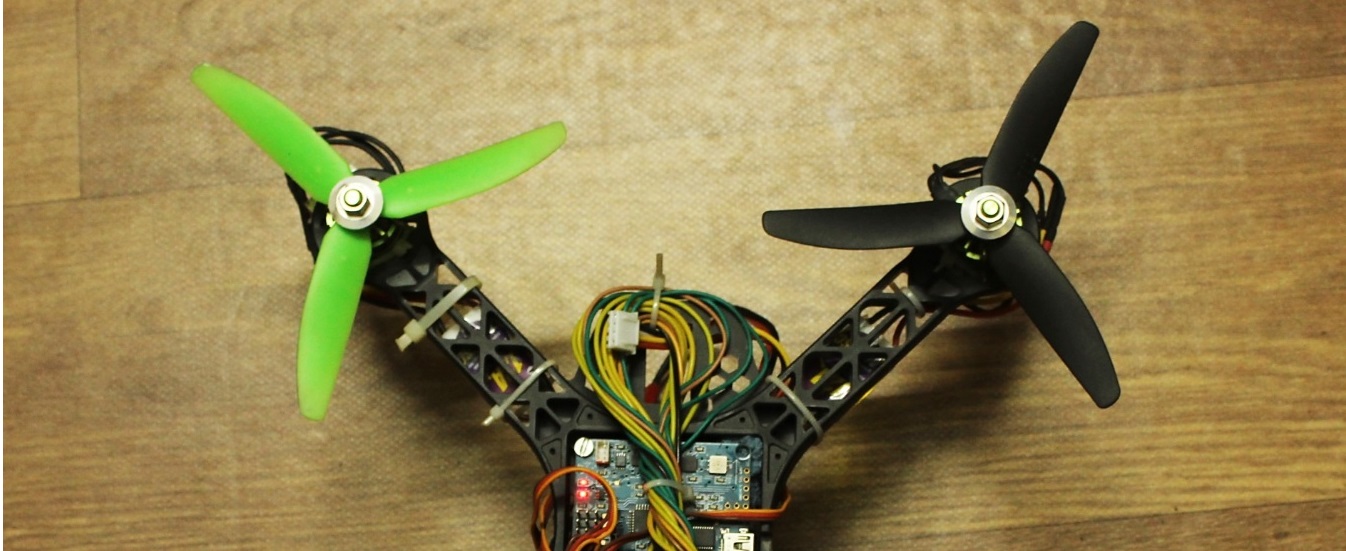
My very first quadcopter build, proud builder of a barely hovering quad. I wanted to build a quadcopter since last year, finally I gathered the money and bought parts for a 250mm quadcopter!! Yipee! 😀 After some serious Googling, I decided on the motors, ESCs, Flight Controller board for my 250mm quad frame. I like